Windowsでも使えるけどUbuntuでも使ってみる
ラズパイピコは当然のことWindowsからも使えますが、サンプルコードを使ったりするのにLinuxのほうが都合が良い場面があります。
ラズパイ4等でも良いのですが、ラズパイ4が如何に強力といえどもPCよりは非力です。
また、外部ディスプレイかSSHで使う必要があります。
そこで、最近構築したUbuntuで使えるようにしてみました。
まず、USBケーブルで接続しますが、Bootボタンを押しながらUSBポートに接続すると書き込みモードで認識されるのはWindowsと同じです。
ラズパイピコは/dev/ttyACM0という名称で認識されます。
gihyo.jp
$ls -l /dev | grep ttyACM crw-rw-rw-+ 1 root dialout 166, 0 10月 2 18:29 ttyACM0
ラズパイピコがエクスプローラーで外部メディアとして表示されるので、hello_usb.uf2をドラッグドロップして書き込みます。(これもWindowsと同様)
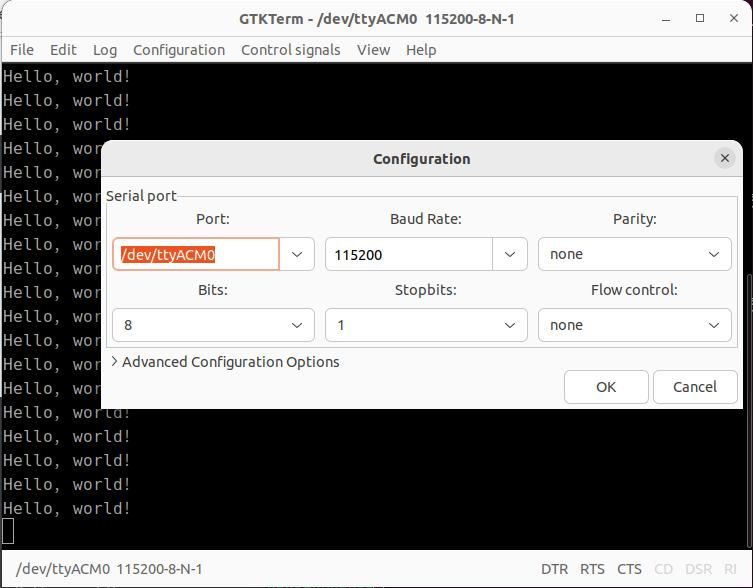
シリアルコンソール接続用のソフトウェアをインストールし、起動します。
$sudo apt install gtkterm
起動
$sudo gtkterm
ポートを選択すると”Hello, world!”が表示されます。
okchan08.hateblo.jp
次に、
ここでかなり悩みましたが、CMakeLists.txtでUSB Serialが有効化されていないためでした。
$cd pico/pico-examples/i2c/mpu6050_i2c $vim CMakeLists.txt
CMakeLists.txtに以下を追記します。
pico_enable_stdio_usb(mpu6050_i2c 1) pico_enable_stdio_uart(mpu6050_i2c 0)
再度Buildします。
$cd pico-examples/build/i2c/mpu6050_i2c $make clean $make
これについては、公式のGitHubのIssueに悩んでいる人の書き込みがありました。
github.com
公式のGetting startにもSerialの項目に書かれています。(公式資料嫁...)
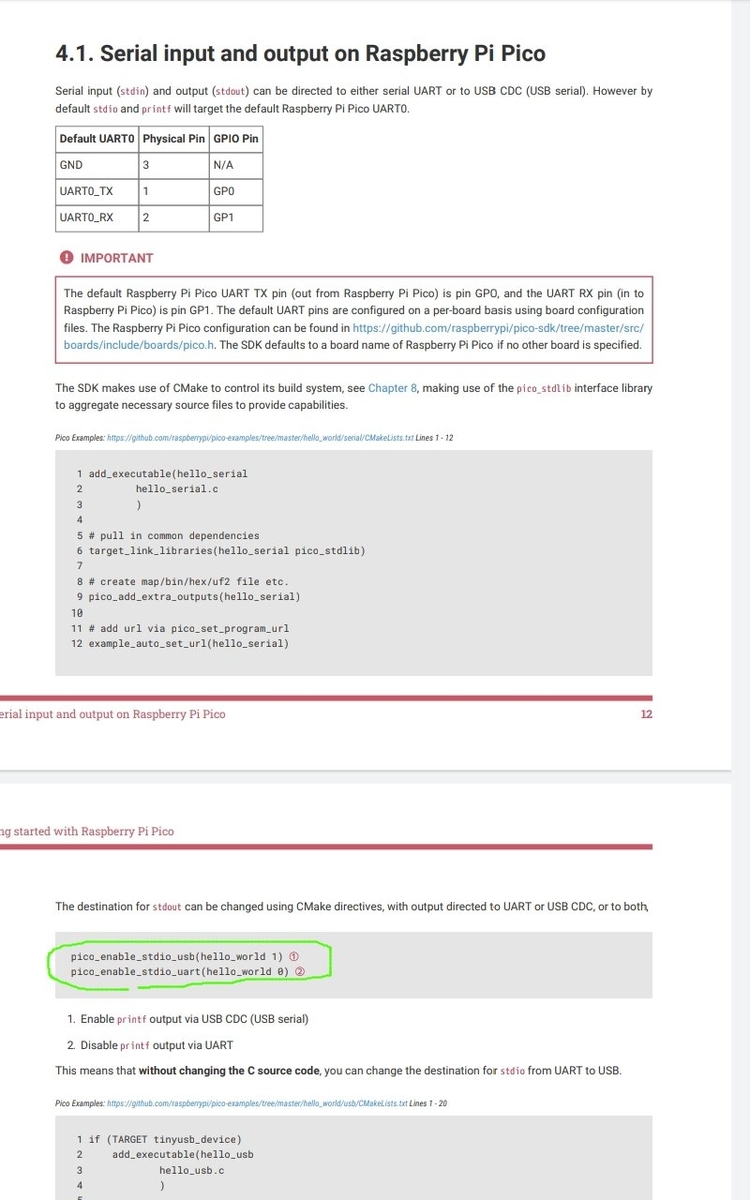
https://datasheets.raspberrypi.org/pico/getting-started-with-pico.pdf
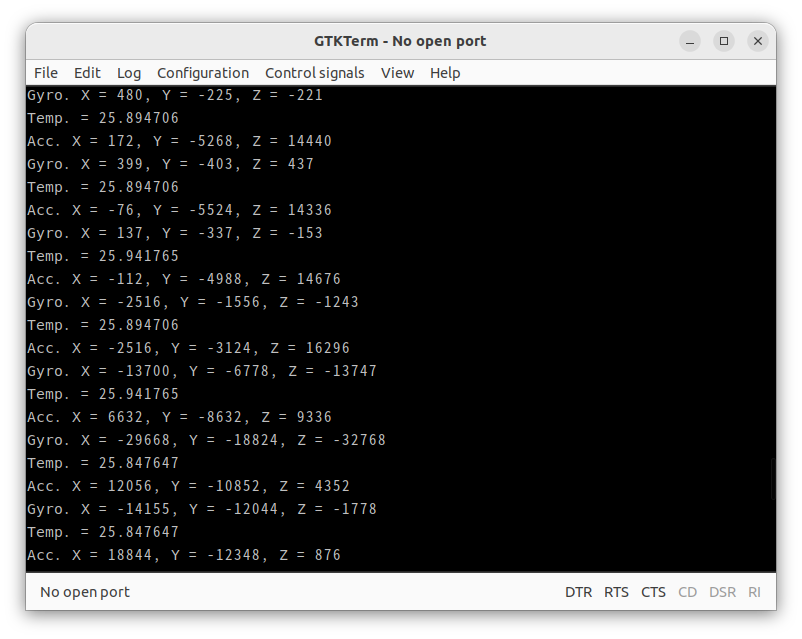
センサー出力を得ることができました。